Задачи компьютерного зрения
Задачи компьютерного зрения. Задачи детекции. Описание принципов работы RCNN, YOLO. Задача сегментации. Семантическая сегментация. Паноптическая сегментация. Описание принципа работы U-net. Задача распознавания лиц. Подходы для метрического обучения. Функции потерь для задач классификации, сегментации.
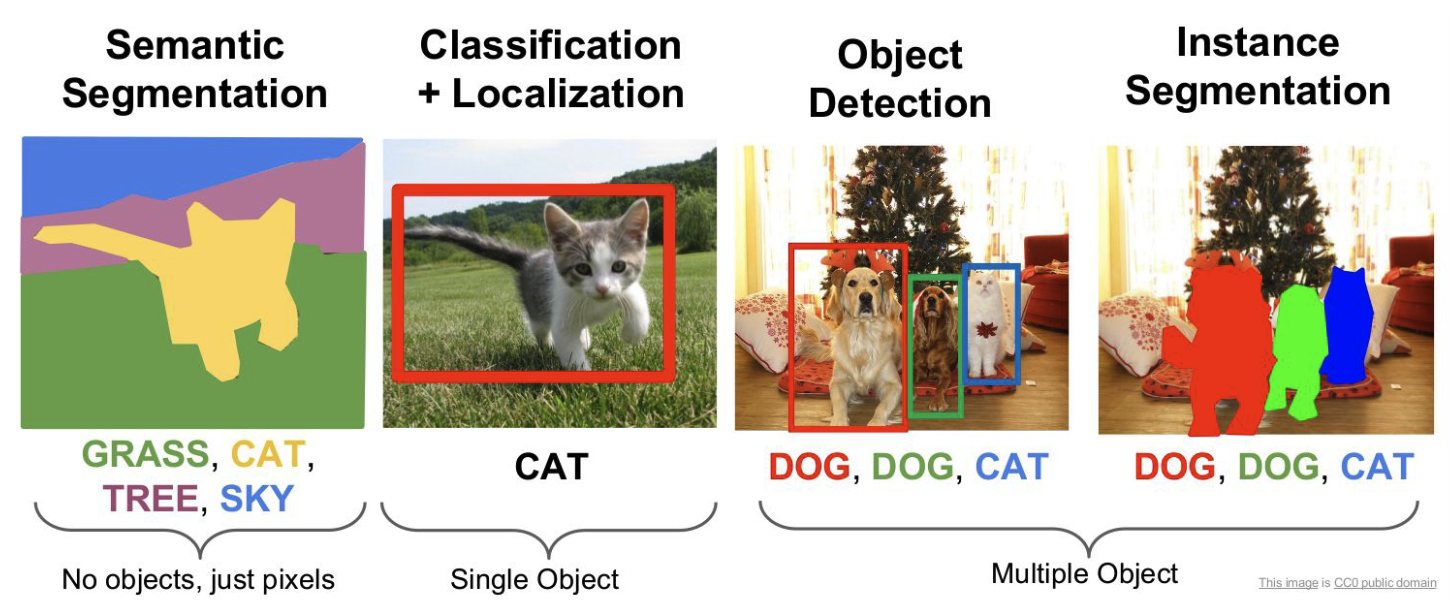
Их много, основными являются те, что указаны на рисунке:
 |
|---|
| Задачи компьютерного зрения. |
Задача детекции
Недостатки классификации
-
Классификация затруднена, если на одном изображении есть несколько объектов разных типов
-
Классификация не говорит от том, есть ли на изображении несколько объектов одного типа
-
Только классификации недостаточно для большинства приложений.
Главное отличие задачи детектирования от задачи классификации в том, что надо не только сказать, есть ли объект на изображении, но и локализовать область нахождения объекта. Если объектов несколько, то требуется найти их все.\ Формальное определение обнаружения объектов
-
Вход: изображение
-
Выход (soft): набор троек \<тип объекта (object type), уверенность (confidence), прямоугольник (bounding box)>
-
Для реальных приложений важнее hard-выход: набор пар \<тип объекта, прямоугольник>, но для сравнения детекторов нужен soft-выход
 |
|---|
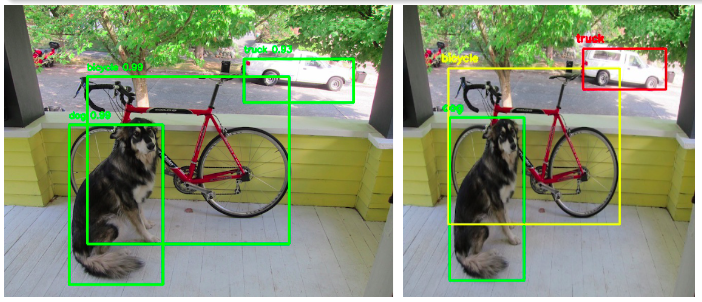
| Слева - soft-выход, справа - hard-выход |
Метрики
Как понять, что один метод обнаружения лучше другого?\ Для этого используется метрика mAP - Mean Average Precision на основе метрик :
Определение mAP \(\(AP = \int_{0}^{1}p(r)dr\)\)
где \(n\) - количество классов, а \(AP_i\) - \(AP\) для \(i\)-го класса.\ AP (Average Precision) - вычисляется средняя точность для Recall в диапазоне от 0 до 1 для одного класса, mAP - среднее значение AP по всем классам.\ Для того, чтобы воспользоваться формулами для mAP необходимо определить TP, FP, FN. Для этого вычислим Intersection over Union (IoU):
TP: IoU>0.5;\ FP: IoU\<0.5 или нет пересечения, или дубликат.\ FN: нет обнаружения или IoU>0.5 и неправильно определен класс объекта;
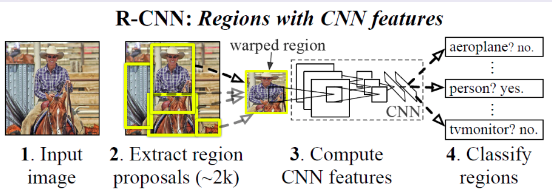
Нейросетевой детектор: R-CNN (Regions with CNN Features)
Детектор состоит из следующих модулей:
-
Предсказыватель объектов (около 2000 кандидатов на изображение)
-
Классификатор (без классификационной головы) для извлечения признаков каждого кандидата
-
Линейный SVM для классификации кандидата
 |
|---|
| R-CNN |
Алгоритм предсказания детекций - selective search. В основе алгоритма селективного поиска (selective search) лежит использование метода иерархической группировки похожих регионов на основе соответствия цвета, текстуры, размера или формы и графов. Для этих графов вершиной является интенсивность текущего пикселя, а ребра соединяют пару соседних пикселей. Абсолютная разница интенсивностей пикселей вершин используется в качестве веса ребра. С помощью графа выделяются фрагменты, которые затем группируются, согласно следующему принципу: ребра между двумя вершинами в одной группе должны иметь меньшие веса, а ребра между двумя вершинами в разных группах должны иметь больший вес. После того, как два наиболее похожих региона сгруппированы, между полученным регионом и его соседями вычисляется новое сходство. Процесс группировки наиболее похожих областей повторяется до тех пор, пока все изображение не станет одной областью. Данный алгоритм не настраивается на данные.\ Backbone для извлечения признаков
-
В качестве начальной инициализации берется классификационная сеть, обученная на 1000 классов из ImageNet
-
Удаляется последний слой и заменяется на слой нужного размера со случайной инициализацией (добавляется новый класс - фон)
-
Обучение производится на тех изображениях с разметкой, у которых IoU>0.5, а остальные рассматриваются как негативные
R-CNN: Обучение Классификатор категорий:
- Для каждого класса обучается свой линейный SVM (один против всех) Для отделения негативных примеров используется другой порог - IoU \< 0.3 (параметр подбирается по валидации и от него очень сильно зависит финальный результат)
Корректировка детекций (bounding box regression):
- Гребневая регрессия
Достоинства и недостатки R-CNN\ Достоинства:
-
Один из лучших методов для своего времени
-
Bounding box regression улучшает качество
-
Замена backbone на более продинутый улучшает качество
Недостатки:
-
Самый главный недостаток - скорость работы (т.к. одни и те же куски картинки обрабатываются много раз)
-
Сложное многоэтапное обучение
-
Обучение требует много дискового пространства и выч. ресурсов
-
Selective Search - необучаемый алгоритм
Нейросетевой детектор YOLO
Идея:
-
Изображение покрывается сеткой \(S\times S\)
-
Выход сети представляет собой тензор размера \(S\times S\times (B\cdot 5 +C)\), где \(B\) - количество детекций с центром в этой ячейке, \(C\) - количество классов
-
Детекция - это вектор \((x,y,w,h,confidence)\)
-
Для всех детекций ячейки вычисляется только одно распределение по классам
-
Каждая ячейка предсказывает только один объект
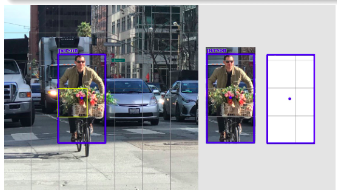
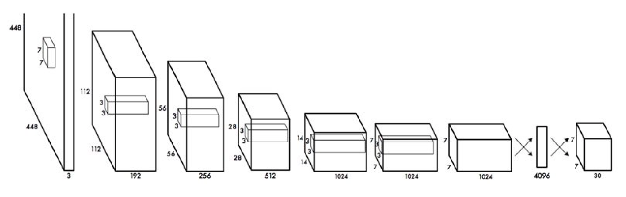
YOLO: Архитектура
Достоинства и недостатки YOLO\ Достоинства:
-
Быстрый алгоритм, может работать в режиме реального времени
-
Все предсказания дает одна нейронная сеть, которая обучается end-to-end
-
Использует для предсказания всё изображение
-
Обладает хорошей обобщающей способностью
Недостатки:
- Ограниченное количество обнаружений на ячейку
YOLO, как и большинство детекторов, может дублировать обнаружения для одного и того же объекта. Чтобы исправить это обычно применяют алгоритм NMS для удаления дубликатов. Такой постпроцессинг добавляет 2-3% mAP.\ Типичная реализация алгоритма выглядит следующим образом:
-
Отсортировать предсказания по confidence
-
Начиная с самых больших показателей идем по предсказаниям и удаляем обнаружения с тем же классом и IoU > 0.5 с предыдущими предсказаниями
Задача сегментации
При семантической сегментации мы каждому пикcелю изображения присваиваем класс (котик на рисунке. При instance сегментации мы хотим классифицировать лишь пиксели отдельных объектов (собачки и котик на рисунке. Важно отметить, что собаки при семантической сегментации были выделены как "DOG", а при instance сегментации каждая собака будет выделена отдельно. А вот паноптическая сегментация объединяет в себе семантическую и instance сегментацию.
Примеры, где можно решать задачу сегментации -- беспилотные автомобили, сегментация новообразований на снимках МРТ.
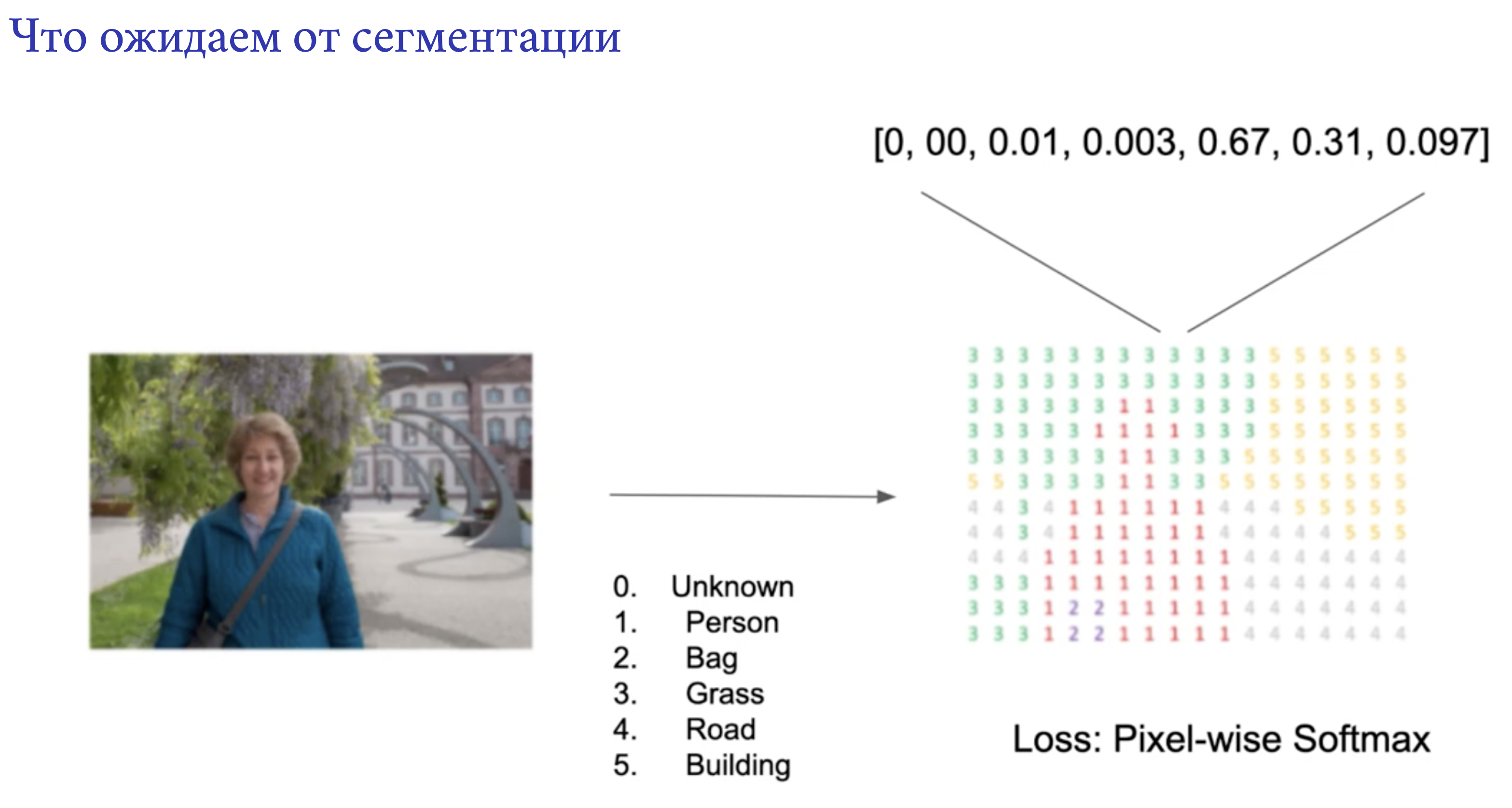 |
|---|
| Задача сегментации. (В данном случае семантическая сегментация), итоговую маску можно сжать с помощью run-length encoding (то есть 5 одинаковых black пикселя будем обозначать B5) |
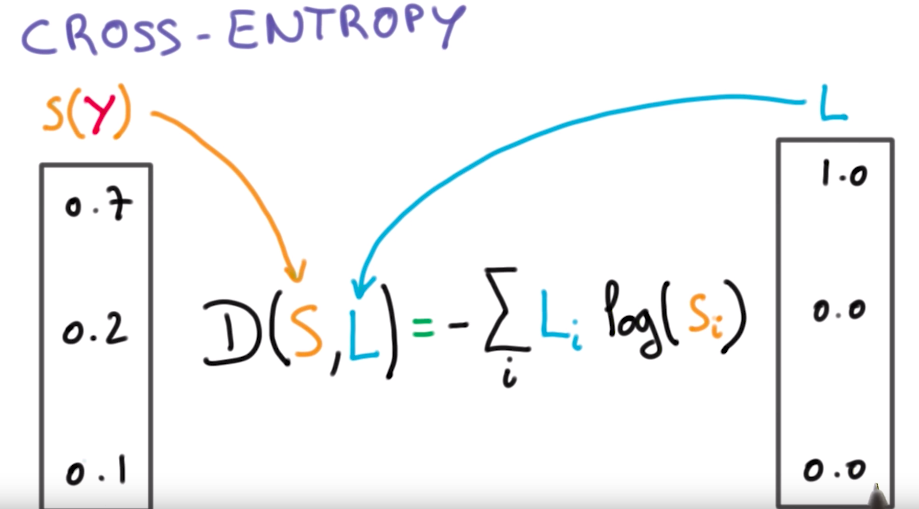
P.S. Тут будет про основные лоссы в задачах сегментации и детекта, т.к. для задач классификации было всё описано в билете 2.3\ Cross-entropy (CE) - loss функция, выраженная следующей формулой:
где \(L\) - ground root метки (то есть имеющиеся у нас разметка, соответствующая реальному классу, который нужно предсказать), а \(S\) - это то, что нам выдала (предсказала) модель
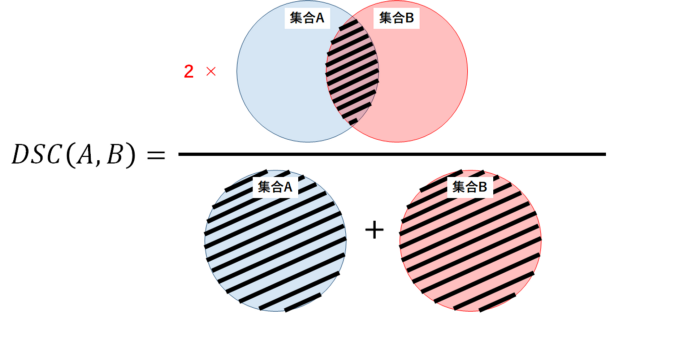
P.S. Dice в лекциях не упоминается никак, кроме названия и того, что нам о нём уже рассказывали, так что всё беру из сети, рассказывать видимо нужно будет на понимание\ Dice - используется для оценки сходства между двумя образцами. С точки зрения теории множеств, dice рассчитывается, как удвоенное пересечение множеств \(A\) и \(B\) на их сумму. Если множества одинаковы, то коэффициент dice равен 1, если вообще не совпадают - то 0.В задачах обнаружения границ, вместо множества \(A\) пиксели истинной границы, вместо \(B\) - пиксели прогнозируемой границы.
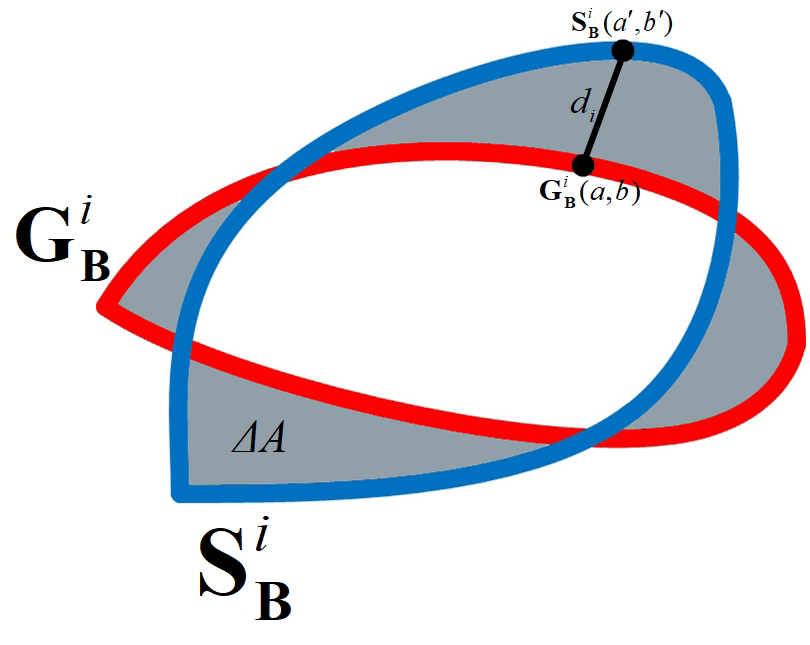
Boundary loss - специфичная функция, используется для "круглых объектов" (сосуды MRT). Считается как разница площадей \(\delta{A}\) между \(G_{B}^{i}\) (ground root) и \(S_{B}^{i}\) (предсказанной) метриками, то есть путем интегрирования. Берем точку \(S_{B}^{i}(a^{'}, b^{'})\), находим к ней соответствующую точку \(G_{B}^{i}(a, b)\) по нормали \(d_i\), и интегрируем по всем точкам.
Трансформеры в компьютерном зрении. Описание принципа работы архитектуры ViT и его разновидностей.
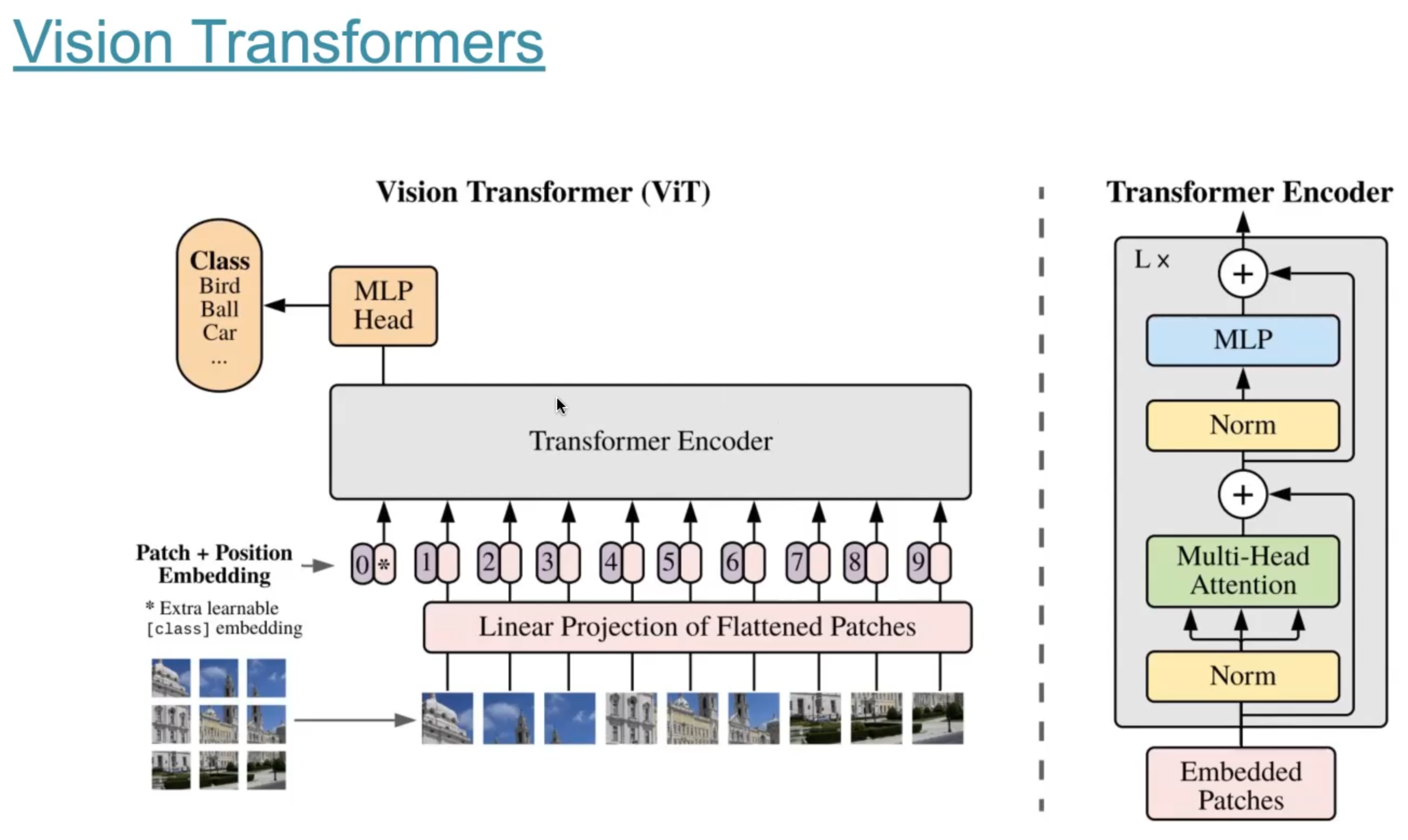
ViT -- Vision Transformers. Общая концепция очень похожа на NLP трансформеры. Изображение делится на патчи (маленькие кусочки), затем полносвязный слой и позиционное кодирование на получившихся embeddings. А потом encoder часть из трансформера (как в BERT), затем еще одна полносвязная часть для классификации / или другой целевой задачи. Смотреть рисунок.
 |
|---|
| Базовая архитектура ViT. |
Общепринятый подход к задачам компьютерного зрения --- использовать картинки как 3D array (высота, ширина, количество каналов) и применять к ним свертки. У такого подхода есть ряд недостатков:
-
не все пиксели одинаково полезны. Например, если у нас задача классификации, то нам важнее сам объект, чем фон. Интересно, что авторы не говорят о том, что Attention уже пробуют применять в задачах компьютерного зрения
-
Свертки не достаточно хорошо работают с пикселями, находящимися далеко друг от друга. Есть подходы с dilated convolutions и global average pooling, но они не решают саму проблему
-
Свертки недостаточно эффективны в очень глубоких нейронных сетях.
Идея: конвертировать изображения в некие визуальные токены и подавать их в трансформер\
-
Вначале используется обычный backbone для получения feature maps
-
Далее feature map конвертируется в визуальные токены
-
Токены подаются в трансформеры
-
Выход трансформера может использоваться для задач классификации
-
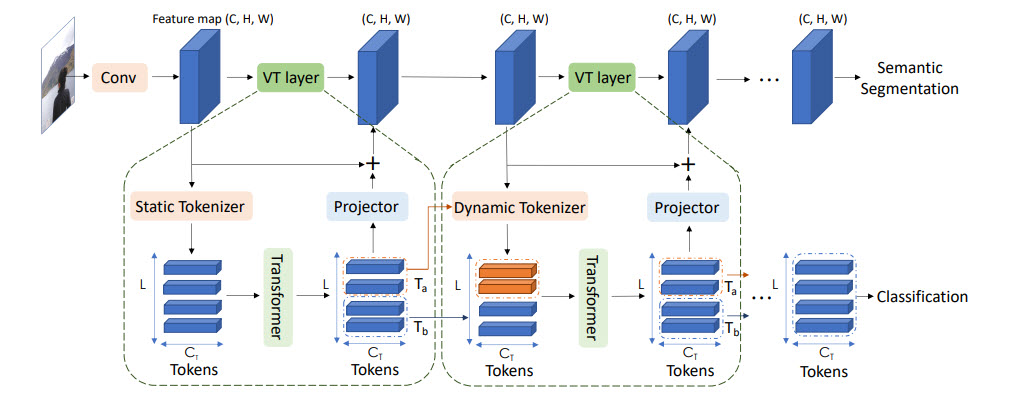
А если объединить выход трансформера с feature map, то можно получить предсказания для задач сегментации\
Visual transformer\ Каждый visual transformer состоит из трёх частей: токенизатор, трансформер, проектор (projector)
Токенизатор
Токенизатор извлекает визуальные токены. По сути мы берем feature map, делаем reshape в (H * W, C) и из этого получаем токены
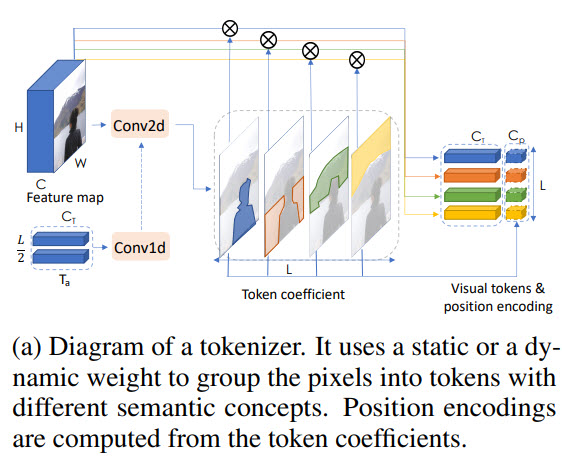
Position encoding
Как обычно, трансформерам нужны не только токены, но ещё и информация об их позиции.
Вначале мы делаем downsample, потом домножаем на тренируемые веса и конкатенируем с токенами. Для корректировки количества каналов можно добавить 1D свертку.
Transformer
\(T_{in}, T_{out}\) - входящие и выходящие токены.